Yang Chen's Paper on LingXtend Accepted at IROS 2024
We are thrilled to announce that our master student Mr. Yang Chen’s paper, titled “Design and Control of a Novel Six-Degree-of-Freedom Hybrid Robotic Arm”, has been accepted for presentation at the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024). This paper introduces LingXtend, a novel hybrid six-degree-of-freedom (DoF) robotic arm, specifically designed to overcome the challenges faced by conventional robotic arms in agricultural settings.
Robotic arms are vital components of fruit-harvesting robots, yet traditional serial and parallel arms often struggle to meet the unique demands of agriculture. These include the need for a large workspace, rapid movement, effective obstacle avoidance, and affordability. LingXtend addresses these issues by combining the strengths of both parallel and serial mechanisms into a single hybrid arm.
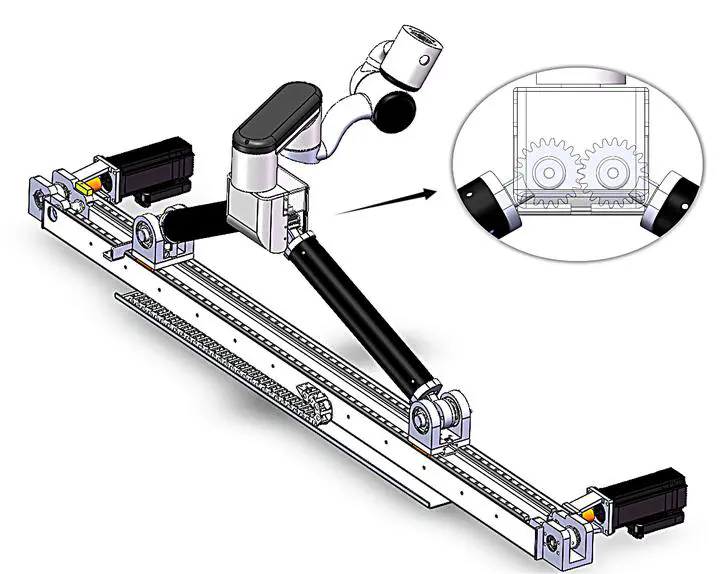
Inspired by the flexibility and precision of yoga, LingXtend features two independently moving sliders along a single rail, functioning like feet. These sliders are connected through linkages and a meshed-gear set, enabling the arm to perform a “split” to maneuver under obstacles commonly found in greenhouses, such as pipes, tables, and beams. This innovative design allows the arm to maintain an optimal pose, even when mounted on a mobile platform, making it highly effective for dynamic fruit-picking tasks.
The hybrid arm also boasts a significantly larger workspace—nearly three times the volume of UR3 serial arms and fourteen times that of ABB IRB parallel arms.
Congratulations to Mr. Yang Chen on reaching this important milestone in his academic career!
Ya Xiong
Research Professor
My research interests include agricultural robotics, manipulator design, computer vision and path planning.