Paper Accepted in IEEE Transactions on AgriFood Electronics: A Fast Path-Planning Method for Continuous Harvesting of Table-Top Grown Strawberries
We are delighted to share that our paper, “A Fast Path-Planning Method for Continuous Harvesting of Table-Top Grown Strawberries,” has been accepted by the prestigious journal IEEE Transactions on AgriFood Electronics.
This work was primarily conducted by Mr. Yang Chen, our former Master’s student, with the conceptual foundation proposed by Dr. Ya Xiong.
Abstract Highlights:
Traditional collision-free path-planning algorithms, such as RRT and A*, often fall short in the context of efficient, continuous fruit harvesting due to their low search efficiency and excessive redundant points. To address this limitation, our research introduces the Interactive Local Minima Search Algorithm (ILMSA), a novel, fast path-planning method designed specifically for the continuous harvesting of table-top grown strawberries.
Key Features of ILMSA:
- Interactive Node Expansion Strategy: Iteratively refines collision-free path segments using local minima points.
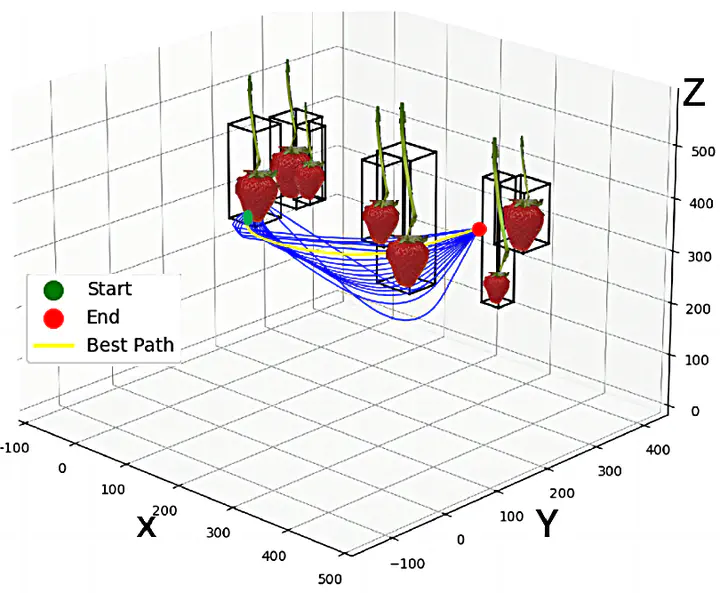
- 3D Path Optimization: Projects the 3D environment onto multiple 2D planes for optimal path generation, followed by smoothing 3D path segments.
Results:
Simulations:
ILMSA outperformed existing methods, achieving:
- 21.5% shorter path length and 97.1% faster planning time compared to 3D-RRT.
- 36.7% shorter paths and 97.8% faster planning time compared to the QAPF method in 3D environments.
Field Tests:
ILMSA demonstrated superior performance in real-world scenarios, achieving:
- 58% faster planning and execution times
- 69% shorter average path lengths compared to the LPS algorithm.
Conclusion:
This approach showcases the potential of ILMSA to enhance the efficiency and precision of continuous fruit harvesting.
We are proud of this achievement and extend our gratitude to all authors and collaborators involved in this research.
Ya Xiong
Research Professor
My research interests include agricultural robotics, manipulator design, computer vision and path planning.