Paper on Real-Time Strawberry Mass Estimation Accepted to IROS 2025
We are pleased to announce that the paper “Online Estimation of Table-Top Grown Strawberry Mass in Field Conditions with Occlusions”, led by Master’s student Jinshan Zhen, has been accepted for presentation at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025). This work addresses a critical challenge in precision agriculture: accurate fruit mass estimation under occlusion scenarios for robotics harvesting.
Technical Abstract
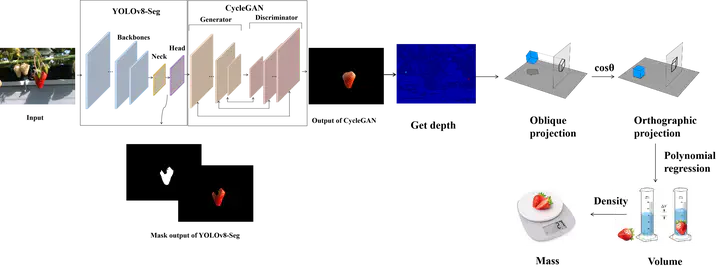
“Accurate mass estimation of table-top grown strawberries under field conditions remains challenging due to frequent occlusions and pose variations. This study proposes a vision-based pipeline integrating RGB-D sensing and deep learning to enable non-destructive, real-time mass estimation. The method employs YOLOv8-Seg for instance segmentation, CycleGAN for occluded region completion, and tilt-angle correction to refine frontal projection area calculations. A polynomial regression model maps geometric features to mass, demonstrating superior performance in occluded scenarios compared to traditional methods.”
Significance
This work enables:
- Harvesting robot online grading through real-time mass feedback
- Generalizable framework for other occluded fruit estimation tasks
Congratulations to Jinshan Zhen and the team! 🎉 We look forward to presenting at IROS 2025 in Hangzhou.
Ya Xiong
Research Professor
My research interests include agricultural robotics, manipulator design, computer vision and path planning.